Follow

近日,国外一名开发者 Michael Romanko 用树莓派手撸了一只机器狗,引起了树莓派社区成员的广泛关注。
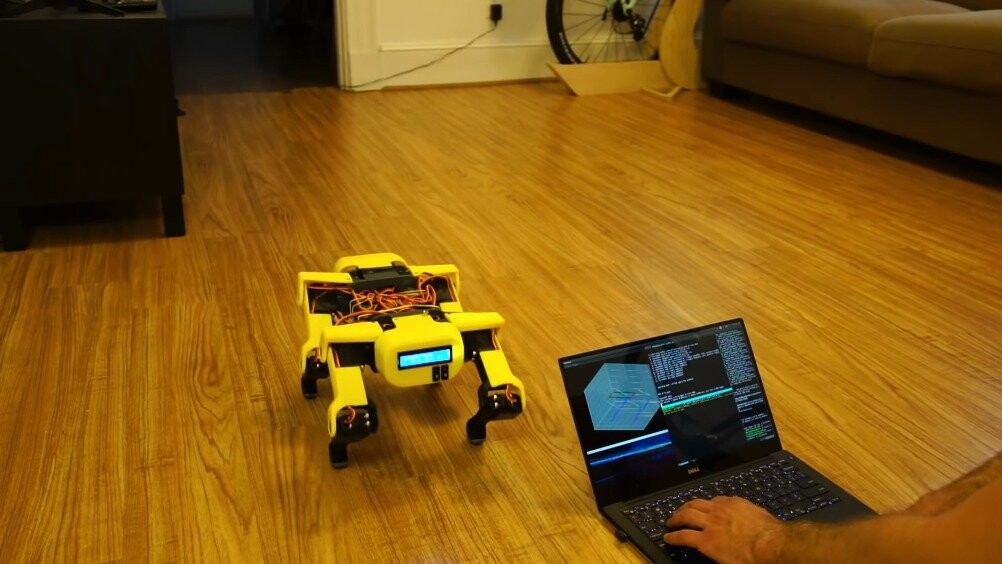
这只机器狗主要基于 Raspberry Pi 3B 搭建,运行的是 Ubuntu 16.04 系统,配合电脑指令,能让机器狗完成站立、行走、坐下等操作。
搭建这只机器狗所需要用到的软硬件配置、功能说明、详细教程、核心源码均已开源到 GitHub 上。各项条件已具备,有兴趣的话,你也可以动手尝试撸一个 [酷炫街舞给手]
GitHub: ![]() 网页链接
网页链接 ![]() GitHubDaily的微博视频
GitHubDaily的微博视频
{kind=link}
